Sequential quadratic programming
Sequential quadratic programming (SQP) is an iterative method for constrained nonlinear optimization which may be considered a quasi-Newton method. SQP methods are used on mathematical problems for which the objective function and the constraints are twice continuously differentiable.
SQP methods solve a sequence of optimization subproblems, each of which optimizes a quadratic model of the objective subject to a linearization of the constraints. If the problem is unconstrained, then the method reduces to Newton's method for finding a point where the gradient of the objective vanishes. If the problem has only equality constraints, then the method is equivalent to applying Newton's method to the first-order optimality conditions, or Karush–Kuhn–Tucker conditions, of the problem.
Algorithm basics
Consider a nonlinear programming problem of the form:

The Lagrangian for this problem is[1]

where and are Lagrange multipliers.


The standard Newton's Method searches for the solution by iterating the following equation, where denotes the Hessian matrix:


.

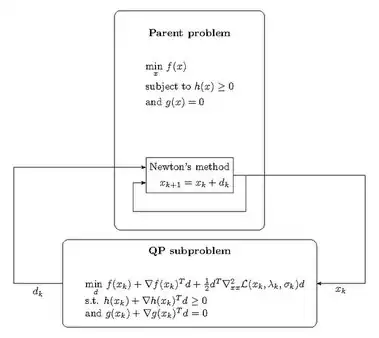
However, because the matrix is generally singular (and therefore non-invertible), the Newton step cannot be calculated directly. Instead the basic sequential quadratic programming algorithm defines an appropriate search direction at an iterate , as a solution to the quadratic programming subproblem





Note that the term in the expression above may be left out for the minimization problem, since it is constant under the operator.


Together, the SQP algorithm starts by first choosing the initial iterate , then calculating and . Then the QP subproblem is built and solved to find the Newton step direction which is used to update the parent problem iterate using . This process is repeated for until the parent problem satisfies a convergence test.




![{\displaystyle \left[x_{k+1},\lambda _{k+1},\sigma _{k+1}\right]^{T}=\left[x_{k},\lambda _{k},\sigma _{k}\right]^{T}+d_{k}}](../I/59b10f852ff2631c155a8ee662af5bf45920b1f2.svg)

Alternative approaches
Implementations
SQP methods have been implemented in well known numerical environments such as MATLAB and GNU Octave. There also exist numerous software libraries, including open source:
- SciPy (de facto standard for scientific Python) has scipy.optimize.minimize(method='SLSQP') solver.
- NLopt (C/C++ implementation, with numerous interfaces including Julia, Python, R, MATLAB/Octave), implemented by Dieter Kraft as part of a package for optimal control, and modified by S. G. Johnson.[2][3]
- ALGLIB SQP solver (C++, C#, Java, Python API)
and commercial
Notes
- Jorge Nocedal and Stephen J. Wright (2006). Numerical Optimization. Springer. ISBN 978-0-387-30303-1.
- Kraft, Dieter (Sep 1994). "Algorithm 733: TOMP–Fortran modules for optimal control calculations". ACM Transactions on Mathematical Software. 20 (3): 262–281. CiteSeerX 10.1.1.512.2567. doi:10.1145/192115.192124. S2CID 16077051. Retrieved 1 February 2019.
- "NLopt Algorithms: SLSQP". Read the Docs. July 1988. Retrieved 1 February 2019.
- KNITRO User Guide: Algorithms
References
- Bonnans, J. Frédéric; Gilbert, J. Charles; Lemaréchal, Claude; Sagastizábal, Claudia A. (2006). Numerical optimization: Theoretical and practical aspects. Universitext (Second revised ed. of translation of 1997 French ed.). Berlin: Springer-Verlag. pp. xiv+490. doi:10.1007/978-3-540-35447-5. ISBN 978-3-540-35445-1. MR 2265882.
- Jorge Nocedal and Stephen J. Wright (2006). Numerical Optimization. Springer. ISBN 978-0-387-30303-1.
External links
|  Optimization computes maxima and minima. | |||||||||||||||||
| ||||||||||||||||||
| ||||||||||||||||||
| ||||||||||||||||||