n-body problem
In physics, the n-body problem is the problem of predicting the individual motions of a group of celestial objects interacting with each other gravitationally.[1] Solving this problem has been motivated by the desire to understand the motions of the Sun, Moon, planets, and visible stars. In the 20th century, understanding the dynamics of globular cluster star systems became an important n-body problem.[2] The n-body problem in general relativity is considerably more difficult to solve due to additional factors like time and space distortions.
| Part of a series on |
| Astrodynamics |
|---|
 |
The classical physical problem can be informally stated as the following:
Given the quasi-steady orbital properties (instantaneous position, velocity and time)[3] of a group of celestial bodies, predict their interactive forces; and consequently, predict their true orbital motions for all future times.[4]
The two-body problem has been completely solved and is discussed below, as well as the famous restricted three-body problem.[5]
History
Knowing three orbital positions of a planet's orbit – positions obtained by Sir Isaac Newton from astronomer John Flamsteed[6] – Newton was able to produce an equation by straightforward analytical geometry, to predict a planet's motion; i.e., to give its orbital properties: position, orbital diameter, period and orbital velocity.[7] Having done so, he and others soon discovered over the course of a few years, those equations of motion did not predict some orbits correctly or even very well.[8] Newton realized that this was because gravitational interactive forces amongst all the planets were affecting all their orbits.
The aforementioned revelation strikes directly at the core of what the n-body issue physically is: as Newton understood, it is not enough to just provide the beginning location and velocity, or even three orbital positions, in order to establish a planet's actual orbit; one must also be aware of the gravitational interaction forces. Thus came the awareness and rise of the n-body "problem" in the early 17th century. These gravitational attractive forces do conform to Newton's laws of motion and to his law of universal gravitation, but the many multiple (n-body) interactions have historically made any exact solution intractable. Ironically, this conformity led to the wrong approach.
After Newton's time the n-body problem historically was not stated correctly because it did not include a reference to those gravitational interactive forces. Newton does not say it directly but implies in his Principia the n-body problem is unsolvable because of those gravitational interactive forces.[9] Newton said[10] in his Principia, paragraph 21:
And hence it is that the attractive force is found in both bodies. The Sun attracts Jupiter and the other planets, Jupiter attracts its satellites and similarly the satellites act on one another. And although the actions of each of a pair of planets on the other can be distinguished from each other and can be considered as two actions by which each attracts the other, yet inasmuch as they are between the same, two bodies they are not two but a simple operation between two termini. Two bodies can be drawn to each other by the contraction of rope between them. The cause of the action is twofold, namely the disposition of each of the two bodies; the action is likewise twofold, insofar as it is upon two bodies; but insofar as it is between two bodies it is single and one ...
Newton concluded via his third law of motion that "according to this Law all bodies must attract each other." This last statement, which implies the existence of gravitational interactive forces, is key.
As shown below, the problem also conforms to Jean Le Rond D'Alembert's non-Newtonian first and second Principles and to the nonlinear n-body problem algorithm, the latter allowing for a closed form solution for calculating those interactive forces.
The problem of finding the general solution of the n-body problem was considered very important and challenging. Indeed, in the late 19th century King Oscar II of Sweden, advised by Gösta Mittag-Leffler, established a prize for anyone who could find the solution to the problem. The announcement was quite specific:
Given a system of arbitrarily many mass points that attract each according to Newton's law, under the assumption that no two points ever collide, try to find a representation of the coordinates of each point as a series in a variable that is some known function of time and for all of whose values the series converges uniformly.
In case the problem could not be solved, any other important contribution to classical mechanics would then be considered to be prizeworthy. The prize was awarded to Poincaré, even though he did not solve the original problem. (The first version of his contribution even contained a serious error.[11]) The version finally printed contained many important ideas which led to the development of chaos theory. The problem as stated originally was finally solved by Karl Fritiof Sundman for n = 3 and generalized to n > 3 by L. K. Babadzanjanz[12][13] and Qiudong Wang.[14]
General formulation
The n-body problem considers n point masses mi, i = 1, 2, …, n in an inertial reference frame in three dimensional space ℝ3 moving under the influence of mutual gravitational attraction. Each mass mi has a position vector qi. Newton's second law says that mass times acceleration mi d2qi/dt2 is equal to the sum of the forces on the mass. Newton's law of gravity says that the gravitational force felt on mass mi by a single mass mj is given by[15]

where G is the gravitational constant and ‖qj − qi‖ is the magnitude of the distance between qi and qj (metric induced by the l2 norm).
Summing over all masses yields the n-body equations of motion:

where U is the self-potential energy

Defining the momentum to be pi = mi dqi/dt, Hamilton's equations of motion for the n-body problem become[16]

where the Hamiltonian function is

and T is the kinetic energy

Hamilton's equations show that the n-body problem is a system of 6n first-order differential equations, with 6n initial conditions as 3n initial position coordinates and 3n initial momentum values.
Symmetries in the n-body problem yield global integrals of motion that simplify the problem.[17] Translational symmetry of the problem results in the center of mass

moving with constant velocity, so that C = L0t + C0, where L0 is the linear velocity and C0 is the initial position. The constants of motion L0 and C0 represent six integrals of the motion. Rotational symmetry results in the total angular momentum being constant

where × is the cross product. The three components of the total angular momentum A yield three more constants of the motion. The last general constant of the motion is given by the conservation of energy H. Hence, every n-body problem has ten integrals of motion.
Because T and U are homogeneous functions of degree 2 and −1, respectively, the equations of motion have a scaling invariance: if qi(t) is a solution, then so is λ−2/3qi(λt) for any λ > 0.[18]
The moment of inertia of an n-body system is given by

and the virial is given by Q = 1/2 dI/dt. Then the Lagrange–Jacobi formula states that[19]

For systems in dynamic equilibrium, the longterm time average of ⟨d2I/dt2⟩ is zero. Then on average the total kinetic energy is half the total potential energy, ⟨T⟩ = 1/2⟨U⟩, which is an example of the virial theorem for gravitational systems.[20] If M is the total mass and R a characteristic size of the system (for example, the radius containing half the mass of the system), then the critical time for a system to settle down to a dynamic equilibrium is[21]

Special cases
Two-body problem
Any discussion of planetary interactive forces has always started historically with the two-body problem. The purpose of this section is to relate the real complexity in calculating any planetary forces. Note in this Section also, several subjects, such as gravity, barycenter, Kepler's Laws, etc.; and in the following Section too (Three-body problem) are discussed on other Wikipedia pages. Here though, these subjects are discussed from the perspective of the n-body problem.
The two-body problem (n = 2) was completely solved by Johann Bernoulli (1667–1748) by classical theory (and not by Newton) by assuming the main point-mass was fixed; this is outlined here.[22] Consider then the motion of two bodies, say the Sun and the Earth, with the Sun fixed, then:

The equation describing the motion of mass m2 relative to mass m1 is readily obtained from the differences between these two equations and after canceling common terms gives:

Where
- r = r2 − r1 is the vector position of m2 relative to m1;
- α is the Eulerian acceleration d2r/dt2;
- η = G(m1 + m2).
The equation α + η/r3r = 0 is the fundamental differential equation for the two-body problem Bernoulli solved in 1734. Notice for this approach forces have to be determined first, then the equation of motion resolved. This differential equation has elliptic, or parabolic or hyperbolic solutions.[23][24][25]
It is incorrect to think of m1 (the Sun) as fixed in space when applying Newton's law of universal gravitation, and to do so leads to erroneous results. The fixed point for two isolated gravitationally interacting bodies is their mutual barycenter, and this two-body problem can be solved exactly, such as using Jacobi coordinates relative to the barycenter.
Dr. Clarence Cleminshaw calculated the approximate position of the Solar System's barycenter, a result achieved mainly by combining only the masses of Jupiter and the Sun. Science Program stated in reference to his work:
The Sun contains 98 per cent of the mass in the solar system, with the superior planets beyond Mars accounting for most of the rest. On the average, the center of the mass of the Sun–Jupiter system, when the two most massive objects are considered alone, lies 462,000 miles from the Sun's center, or some 30,000 miles above the solar surface! Other large planets also influence the center of mass of the solar system, however. In 1951, for example, the systems' center of mass was not far from the Sun's center because Jupiter was on the opposite side from Saturn, Uranus and Neptune. In the late 1950s, when all four of these planets were on the same side of the Sun, the system's center of mass was more than 330,000 miles from the solar surface, Dr. C. H. Cleminshaw of Griffith Observatory in Los Angeles has calculated.[26]
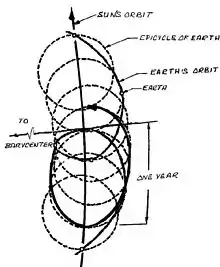
The Sun wobbles as it rotates around the Galactic Center, dragging the Solar System and Earth along with it. What mathematician Kepler did in arriving at his three famous equations was curve-fit the apparent motions of the planets using Tycho Brahe's data, and not curve-fitting their true circular motions about the Sun (see Figure). Both Robert Hooke and Newton were well aware that Newton's Law of Universal Gravitation did not hold for the forces associated with elliptical orbits.[10] In fact, Newton's Universal Law does not account for the orbit of Mercury, the asteroid belt's gravitational behavior, or Saturn's rings.[27] Newton stated (in section 11 of the Principia) that the main reason, however, for failing to predict the forces for elliptical orbits was that his math model was for a body confined to a situation that hardly existed in the real world, namely, the motions of bodies attracted toward an unmoving center. Some present physics and astronomy textbooks do not emphasize the negative significance of Newton's assumption and end up teaching that his mathematical model is in effect reality. It is to be understood that the classical two-body problem solution above is a mathematical idealization. See also Kepler's first law of planetary motion.
Three-body problem
This section relates a historically important n-body problem solution after simplifying assumptions were made.
In the past not much was known about the n-body problem for n ≥ 3.[28] The case n = 3 has been the most studied. Many earlier attempts to understand the three-body problem were quantitative, aiming at finding explicit solutions for special situations.
- In 1687, Isaac Newton published in the Principia the first steps in the study of the problem of the movements of three bodies subject to their mutual gravitational attractions, but his efforts resulted in verbal descriptions and geometrical sketches; see especially Book 1, Proposition 66 and its corollaries (Newton, 1687 and 1999 (transl.), see also Tisserand, 1894).
- In 1767, Euler found collinear motions, in which three bodies of any masses move proportionately along a fixed straight line. The Euler's three-body problem is the special case in which two of the bodies are fixed in space (this should not be confused with the circular restricted three-body problem, in which the two massive bodies describe a circular orbit and are only fixed in a synodic reference frame).
- In 1772, Lagrange discovered two classes of periodic solution, each for three bodies of any masses. In one class, the bodies lie on a rotating straight line. In the other class, the bodies lie at the vertices of a rotating equilateral triangle. In either case, the paths of the bodies will be conic sections. Those solutions led to the study of central configurations, for which q̈ = kq for some constant k > 0.
- A major study of the Earth–Moon–Sun system was undertaken by Charles-Eugène Delaunay, who published two volumes on the topic, each of 900 pages in length, in 1860 and 1867. Among many other accomplishments, the work already hints at chaos, and clearly demonstrates the problem of so-called "small denominators" in perturbation theory.
- In 1917, Forest Ray Moulton published his now classic, An Introduction to Celestial Mechanics (see references) with its plot of the restricted three-body problem solution (see figure below).[29] An aside, see Meirovitch's book, pages 413–414 for his restricted three-body problem solution.[30]
.gif)
Moulton's solution may be easier to visualize (and definitely easier to solve) if one considers the more massive body (such as the Sun) to be stationary in space, and the less massive body (such as Jupiter) to orbit around it, with the equilibrium points (Lagrangian points) maintaining the 60° spacing ahead of, and behind, the less massive body almost in its orbit (although in reality neither of the bodies are truly stationary, as they both orbit the center of mass of the whole system—about the barycenter). For sufficiently small mass ratio of the primaries, these triangular equilibrium points are stable, such that (nearly) massless particles will orbit about these points as they orbit around the larger primary (Sun). The five equilibrium points of the circular problem are known as the Lagrangian points. See figure below:
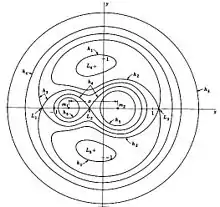
In the restricted three-body problem math model figure above (after Moulton), the Lagrangian points L4 and L5 are where the Trojan planetoids resided (see Lagrangian point); m1 is the Sun and m2 is Jupiter. L2 is a point within the asteroid belt. It has to be realized for this model, this whole Sun-Jupiter diagram is rotating about its barycenter. The restricted three-body problem solution predicted the Trojan planetoids before they were first seen. The h-circles and closed loops echo the electromagnetic fluxes issued from the Sun and Jupiter. It is conjectured, contrary to Richard H. Batin's conjecture (see References), the two h1 are gravity sinks, in and where gravitational forces are zero, and the reason the Trojan planetoids are trapped there. The total amount of mass of the planetoids is unknown.
The restricted three-body problem that assumes the mass of one of the bodies is negligible. For a discussion of the case where the negligible body is a satellite of the body of lesser mass, see Hill sphere; for binary systems, see Roche lobe. Specific solutions to the three-body problem result in chaotic motion with no obvious sign of a repetitious path.
The restricted problem (both circular and elliptical) was worked on extensively by many famous mathematicians and physicists, most notably by Poincaré at the end of the 19th century. Poincaré's work on the restricted three-body problem was the foundation of deterministic chaos theory. In the restricted problem, there exist five equilibrium points. Three are collinear with the masses (in the rotating frame) and are unstable. The remaining two are located on the third vertex of both equilateral triangles of which the two bodies are the first and second vertices.
Four-body problem
Inspired by the circular restricted three-body problem, the four-body problem can be greatly simplified by considering a smaller body to have a small mass compared to the other three massive bodies, which in turn are approximated to describe circular orbits. This is known as the bicircular restricted four-body problem (also known as bicircular model) and it can be traced back to 1960 in a NASA report written by Su-Shu Huang.[31] This formulation has been highly relevant in the astrodynamics, mainly to model spacecraft trajectories in the Earth-Moon system with the addition of the gravitational attraction of the Sun. The former formulation of the bicircular restricted four-body problem can be problematic when modelling other systems than the Earth-Moon-Sun, so the formulation was generalized by Negri and Prado[32] to expand the application range and improve the accuracy without loss of simplicity.
Planetary problem
The planetary problem is the n-body problem in the case that one of the masses is much larger than all the others. A prototypical example of a planetary problem is the Sun–Jupiter–Saturn system, where the mass of the Sun is about 1000 times larger than the masses of Jupiter or Saturn.[18] An approximate solution to the problem is to decompose it into n − 1 pairs of star–planet Kepler problems, treating interactions among the planets as perturbations. Perturbative approximation works well as long as there are no orbital resonances in the system, that is none of the ratios of unperturbed Kepler frequencies is a rational number. Resonances appear as small denominators in the expansion.
The existence of resonances and small denominators led to the important question of stability in the planetary problem: do planets, in nearly circular orbits around a star, remain in stable or bounded orbits over time?[18][33] In 1963, Vladimir Arnold proved using KAM theory a kind of stability of the planetary problem: there exists a set of positive measure of quasiperiodic orbits in the case of the planetary problem restricted to the plane.[33] In the KAM theory, chaotic planetary orbits would be bounded by quasiperiodic KAM tori. Arnold's result was extended to a more general theorem by Féjoz and Herman in 2004.[34]
Central configurations
A central configuration q1(0), …, qN(0) is an initial configuration such that if the particles were all released with zero velocity, they would all collapse toward the center of mass C.[33] Such a motion is called homothetic. Central configurations may also give rise to homographic motions in which all masses moves along Keplerian trajectories (elliptical, circular, parabolic, or hyperbolic), with all trajectories having the same eccentricity e. For elliptical trajectories, e = 1 corresponds to homothetic motion and e = 0 gives a relative equilibrium motion in which the configuration remains an isometry of the initial configuration, as if the configuration was a rigid body.[35] Central configurations have played an important role in understanding the topology of invariant manifolds created by fixing the first integrals of a system.
n-body choreography
Solutions in which all masses move on the same curve without collisions are called choreographies.[36] A choreography for n = 3 was discovered by Lagrange in 1772 in which three bodies are situated at the vertices of an equilateral triangle in the rotating frame. A figure eight choreography for n = 3 was found numerically by C. Moore in 1993[37] and generalized and proven by A. Chenciner and R. Montgomery in 2000.[38] Since then, many other choreographies have been found for n ≥ 3.
Analytic approaches
For every solution of the problem, not only applying an isometry or a time shift but also a reversal of time (unlike in the case of friction) gives a solution as well.
In the physical literature about the n-body problem (n ≥ 3), sometimes reference is made to "the impossibility of solving the n-body problem" (via employing the above approach). However, care must be taken when discussing the 'impossibility' of a solution, as this refers only to the method of first integrals (compare the theorems by Abel and Galois about the impossibility of solving algebraic equations of degree five or higher by means of formulas only involving roots).
Power series solution
One way of solving the classical n-body problem is "the n-body problem by Taylor series".
We start by defining the system of differential equations:

As xi(t0) and dxi(t0)/dt are given as initial conditions, every d2xi(t)/dt2 is known. Differentiating d2xi(t)/dt2 results in d3xi(t)/dt3 which at t0 which is also known, and the Taylor series is constructed iteratively.
A generalized Sundman global solution
In order to generalize Sundman's result for the case n > 3 (or n = 3 and c = 0) one has to face two obstacles:
- As has been shown by Siegel, collisions which involve more than two bodies cannot be regularized analytically, hence Sundman's regularization cannot be generalized.
- The structure of singularities is more complicated in this case: other types of singularities may occur (see below).
Lastly, Sundman's result was generalized to the case of n > 3 bodies by Qiudong Wang in the 1990s.[39] Since the structure of singularities is more complicated, Wang had to leave out completely the questions of singularities. The central point of his approach is to transform, in an appropriate manner, the equations to a new system, such that the interval of existence for the solutions of this new system is [0,∞).
Singularities of the n-body problem
There can be two types of singularities of the n-body problem:
- collisions of two or more bodies, but for which q(t) (the bodies' positions) remains finite. (In this mathematical sense, a "collision" means that two pointlike bodies have identical positions in space.)
- singularities in which a collision does not occur, but q(t) does not remain finite. In this scenario, bodies diverge to infinity in a finite time, while at the same time tending towards zero separation (an imaginary collision occurs "at infinity").
The latter ones are called Painlevé's conjecture (no-collisions singularities). Their existence has been conjectured for n > 3 by Painlevé (see Painlevé conjecture). Examples of this behavior for n = 5 have been constructed by Xia[40] and a heuristic model for n = 4 by Gerver.[41] Donald G. Saari has shown that for 4 or fewer bodies, the set of initial data giving rise to singularities has measure zero.[42]
Simulation
While there are analytic solutions available for the classical (i.e. nonrelativistic) two-body problem and for selected configurations with n > 2, in general n-body problems must be solved or simulated using numerical methods.[21]
Few bodies
For a small number of bodies, an n-body problem can be solved using direct methods, also called particle–particle methods. These methods numerically integrate the differential equations of motion. Numerical integration for this problem can be a challenge for several reasons. First, the gravitational potential is singular; it goes to infinity as the distance between two particles goes to zero. The gravitational potential may be "softened" to remove the singularity at small distances:[21]

Second, in general for n > 2, the n-body problem is chaotic,[43] which means that even small errors in integration may grow exponentially in time. Third, a simulation may be over large stretches of model time (e.g. millions of years) and numerical errors accumulate as integration time increases.
There are a number of techniques to reduce errors in numerical integration.[21] Local coordinate systems are used to deal with widely differing scales in some problems, for example an Earth–Moon coordinate system in the context of a solar system simulation. Variational methods and perturbation theory can yield approximate analytic trajectories upon which the numerical integration can be a correction. The use of a symplectic integrator ensures that the simulation obeys Hamilton's equations to a high degree of accuracy and in particular that energy is conserved.
Many bodies
Direct methods using numerical integration require on the order of 1/2n2 computations to evaluate the potential energy over all pairs of particles, and thus have a time complexity of O(n2). For simulations with many particles, the O(n2) factor makes large-scale calculations especially time-consuming.[21]
A number of approximate methods have been developed that reduce the time complexity relative to direct methods:[21]
- Tree code methods, such as a Barnes–Hut simulation, are spatially-hierarchical methods used when distant particle contributions do not need to be computed to high accuracy. The potential of a distant group of particles is computed using a multipole expansion or other approximation of the potential. This allows for a reduction in complexity to O(n log n).
- Fast multipole methods take advantage of the fact that the multipole-expanded forces from distant particles are similar for particles close to each other, and uses local expansions of far-field forces to reduce computational effort. It is claimed that this further approximation reduces the complexity to O(n).[21]
- Particle mesh methods divide up simulation space into a three dimensional grid onto which the mass density of the particles is interpolated. Then calculating the potential becomes a matter of solving a Poisson equation on the grid, which can be computed in O(n log n) time using fast Fourier transform or O(n) time using multigrid techniques. This can provide fast solutions at the cost of higher error for short-range forces. Adaptive mesh refinement can be used to increase accuracy in regions with large numbers of particles.
- P3M and PM-tree methods are hybrid methods that use the particle mesh approximation for distant particles, but use more accurate methods for close particles (within a few grid intervals). P3M stands for particle–particle, particle–mesh and uses direct methods with softened potentials at close range. PM-tree methods instead use tree codes at close range. As with particle mesh methods, adaptive meshes can increase computational efficiency.
- Mean field methods approximate the system of particles with a time-dependent Boltzmann equation representing the mass density that is coupled to a self-consistent Poisson equation representing the potential. It is a type of smoothed-particle hydrodynamics approximation suitable for large systems.
Strong gravitation
In astrophysical systems with strong gravitational fields, such as those near the event horizon of a black hole, n-body simulations must take into account general relativity; such simulations are the domain of numerical relativity. Numerically simulating the Einstein field equations is extremely challenging[21] and a parameterized post-Newtonian formalism (PPN), such as the Einstein–Infeld–Hoffmann equations, is used if possible. The two-body problem in general relativity is analytically solvable only for the Kepler problem, in which one mass is assumed to be much larger than the other.[44]
Other n-body problems
Most work done on the n-body problem has been on the gravitational problem. But there exist other systems for which n-body mathematics and simulation techniques have proven useful.
In large scale electrostatics problems, such as the simulation of proteins and cellular assemblies in structural biology, the Coulomb potential has the same form as the gravitational potential, except that charges may be positive or negative, leading to repulsive as well as attractive forces.[45] Fast Coulomb solvers are the electrostatic counterpart to fast multipole method simulators. These are often used with periodic boundary conditions on the region simulated and Ewald summation techniques are used to speed up computations.[46]
In statistics and machine learning, some models have loss functions of a form similar to that of the gravitational potential: a sum of kernel functions over all pairs of objects, where the kernel function depends on the distance between the objects in parameter space.[47] Example problems that fit into this form include all-nearest-neighbors in manifold learning, kernel density estimation, and kernel machines. Alternative optimizations to reduce the O(n2) time complexity to O(n) have been developed, such as dual tree algorithms, that have applicability to the gravitational n-body problem as well.
A technique in Computational fluid dynamics called Vortex Methods sees the vorticity in a fluid domain discretized onto particles which are then advected with the velocity at their centers. Because the fluid velocity and vorticity are related via a Poisson's equation, the velocity can be solved in the same manner as gravitation and electrostatics: as an n-body summation over all vorticity-containing particles. The summation uses the Biot-Savart law, with vorticity taking the place of electrical current.[48] In the context of particle-laden turbulent multiphase flows, determining an overall disturbance field generated by all particles is an n-body problem. If the particles translating within the flow are much smaller than the flow's Kolmogorov scale, their linear Stokes disturbance fields can be superposed, yielding a system of 3n equations for 3 components of disturbance velocities at the location of n particles.[49][50]
See also
- Celestial mechanics
- Gravitational two-body problem
- Jacobi integral
- Lunar theory
- Natural units
- Numerical model of the Solar System
- Stability of the Solar System
- Few-body systems
- N-body simulation, a method for numerically obtaining trajectories of bodies in an N-body system.
Notes
- Leimanis and Minorsky: Our interest is with Leimanis, who first discusses some history about the n-body problem, especially Ms. Kovalevskaya's 1868–1888 twenty-year complex-variables approach, failure; Section 1: "The Dynamics of Rigid Bodies and Mathematical Exterior Ballistics" (Chapter 1, "The motion of a rigid body about a fixed point (Euler and Poisson equations)"; Chapter 2, "Mathematical Exterior Ballistics"), good precursor background to the n-body problem; Section 2: "Celestial Mechanics" (Chapter 1, "The Uniformization of the Three-body Problem (Restricted Three-body Problem)"; Chapter 2, "Capture in the Three-Body Problem"; Chapter 3, "Generalized n-body Problem").
- See references cited for Heggie and Hut.
- Quasi-steady loads are the instantaneous inertial loads generated by instantaneous angular velocities and accelerations, as well as translational accelerations (9 variables). It is as though one took a photograph, which also recorded the instantaneous position and properties of motion. In contrast, under a steady-state condition, a system's state is invariant to time; otherwise, the first derivatives and all higher derivatives are zero.
- R. M. Rosenberg states the n-body problem similarly (see References): "Each particle in a system of a finite number of particles is subjected to a Newtonian gravitational attraction from all the other particles, and to no other forces. If the initial state of the system is given, how will the particles move?" Rosenberg failed to realize, like everyone else, that it is necessary to determine the forces first before the motions can be determined.
- A general, classical solution in terms of first integrals is known to be impossible. An exact theoretical solution for arbitrary n can be approximated via Taylor series, but in practice such an infinite series must be truncated, giving at best only an approximate solution; and an approach now obsolete. In addition, the n-body problem may be solved using numerical integration, but these, too, are approximate solutions; and again obsolete. See Sverre J. Aarseth's book Gravitational n-Body Simulations listed in the References.
- Clark, David H.; Clark, Stephen P. H. (2001). The Suppressed Scientific Discoveries of Stephen Gray and John Flamsteed, Newton's Tyranny. W. H. Freeman and Co.. A popularization of the historical events and bickering between those parties, but more importantly about the results they produced.
- See Brewster, David (1905). "Discovery of gravitation, A.D. 1666". In Johnson, Rossiter (ed.). The Great Events by Famous Historians. Vol. XII. The National Alumni. pp. 51–65.
- Rudolf Kurth has an extensive discussion in his book (see References) on planetary perturbations. An aside: these mathematically undefined planetary perturbations (wobbles) still exist undefined even today and planetary orbits have to be constantly updated, usually yearly. See Astronomical Ephemeris and the American Ephemeris and Nautical Almanac, prepared jointly by the Nautical Almanac Offices of the United Kingdom and the United States of America.
- See Principia, Book Three, System of the World, "General Scholium", page 372, last paragraph. Newton was well aware that his mathematical model did not reflect physical reality. This edition referenced is from the Great Books of the Western World, Volume 34, which was translated by Andrew Motte and revised by Florian Cajori. This same paragraph is on page 1160 in Stephen Hawkins, On the Shoulders of Giants, 2002 edition; is a copy from Daniel Adee's 1848 addition. Cohen also has translated new editions: Introduction to Newton's Principia, 1970; and Isaac Newton's Principia, with Variant Readings, 1972. Cajori also wrote History of Science, which is online.
- See I. Bernard Cohen's Scientific American article.
- For details of the serious error in Poincare's first submission see the article by Diacu.
- Babadzanjanz, L. K. (1979), "Existence of the continuations in the N-body problem", Celestial Mechanics, 20 (1): 43–57, Bibcode:1979CeMec..20...43B, doi:10.1007/BF01236607, MR 0538663, S2CID 120358878.
- Babadzanjanz, L. K. (1993), "On the global solution of the N-body problem", Celestial Mechanics and Dynamical Astronomy, 56 (3): 427–449, Bibcode:1993CeMDA..56..427B, doi:10.1007/BF00691812, MR 1225892, S2CID 120617936.
- Wang, Qiu Dong (1991), "The global solution of the n-body problem", Celestial Mechanics and Dynamical Astronomy, 50 (1): 73–88, Bibcode:1991CeMDA..50...73W, doi:10.1007/BF00048987, MR 1117788, S2CID 118132097.
- Meyer 2009, pp. 27–28
- Meyer 2009, p. 28
- Meyer 2009, pp. 28–29
- Chenciner 2007
- Meyer 2009, p. 34
- "AST1100 Lecture Notes: 5 The virial theorem" (PDF). University of Oslo. Retrieved 25 March 2014.
- Trenti 2008
- See Bate, Mueller, and White, Chapter 1: "Two-Body Orbital Mechanics", pp. 1–49. These authors were from the Department of Astronautics and Computer Science, United States Air Force Academy. Their textbook is not filled with advanced mathematics.
- For the classical approach, if the common center of mass (i.e., the barycenter) of the two bodies is considered to be at rest, then each body travels along a conic section which has a focus at the barycenter of the system. In the case of a hyperbola it has the branch at the side of that focus. The two conics will be in the same plane. The type of conic (circle, ellipse, parabola or hyperbola) is determined by finding the sum of the combined kinetic energy of two bodies and the potential energy when the bodies are far apart. (This potential energy is always a negative value; energy of rotation of the bodies about their axes is not counted here)
- If the sum of the energies is negative, then they both trace out ellipses.
- If the sum of both energies is zero, then they both trace out parabolas. As the distance between the bodies tends to infinity, their relative speed tends to zero.
- If the sum of both energies is positive, then they both trace out hyperbolas. As the distance between the bodies tends to infinity, their relative speed tends to some positive number.
- For this approach see Lindsay's Physical Mechanics, Chapter 3: "Curvilinear Motion in a Plane", and specifically paragraphs 3–9, "Planetary Motion"; pp. 83–96. Lindsay presentation goes a long way in explaining these latter comments for the fixed two-body problem; i.e., when the Sun is assumed fixed.
- Note: The fact a parabolic orbit has zero energy arises from the assumption the gravitational potential energy goes to zero as the bodies get infinitely far apart. One could assign any value to the potential energy in the state of infinite separation. That state is assumed to have zero potential energy by convention.
- Science Program's
The Nature of the Universe states Clarence Cleminshaw (1902–1985) served as assistant director of Griffith Observatory from 1938 to 1958 and as director from 1958 to 1969. Some publications by Cleminshaw:
- Cleminshaw, C. H.: "Celestial Speeds", 4 1953, equation, Kepler, orbit, comet, Saturn, Mars, velocity.
- Cleminshaw, C. H.: "The Coming Conjunction of Jupiter and Saturn", 7 1960, Saturn, Jupiter, observe, conjunction.
- Cleminshaw, C. H.: "The Scale of The Solar System", 7 1959, Solar system, scale, Jupiter, sun, size, light.
- Brush, Stephen G., ed. (1983). Maxwell on Saturn's Rings. MIT Press.
- See Leimanis and Minorsky's historical comments.
- See Moulton's Restricted Three-body Problem for its analytical and graphical solution.
- See Meirovitch's book: Chapters 11: "Problems in Celestial Mechanics"; 12; "Problem in Spacecraft Dynamics"; and Appendix A: "Dyadics".
- Huang, Su-Shu. "Very Restricted Four-Body Problem". NASA TND-501.
- Negri, Rodolfo B.; Prado, Antonio F. B. A. (2020). "Generalizing the Bicircular Restricted Four-Body Problem". Journal of Guidance, Control, and Dynamics. 43 (6): 1173–1179. Bibcode:2020JGCD...43.1173N. doi:10.2514/1.G004848. S2CID 213600592.
- Chierchia 2010
- Féjoz 2004
- See Chierchia 2010 for animations illustrating homographic motions.
- Celletti 2008
- Moore, Cristopher (1993-06-14). "Braids in classical dynamics". Physical Review Letters. 70 (24): 3675–3679. Bibcode:1993PhRvL..70.3675M. doi:10.1103/PhysRevLett.70.3675. PMID 10053934.
- Chenciner, Alain; Montgomery, Richard (November 2000). "A Remarkable Periodic Solution of the Three-Body Problem in the Case of Equal Masses". The Annals of Mathematics. 152 (3): 881. arXiv:math/0011268. Bibcode:2000math.....11268C. doi:10.2307/2661357. JSTOR 2661357. S2CID 10024592.
- Qiu-Dong, Wang (1990-03-01). "The global solution of the N-body problem". Celestial Mechanics and Dynamical Astronomy. 50 (1): 73–88. Bibcode:1990CeMDA..50...73W. doi:10.1007/BF00048987. ISSN 0923-2958. S2CID 118132097.
- Xia, Zhihong (May 1992). "The Existence of Noncollision Singularities in Newtonian Systems". Ann. Math. Second Series. 135 (3): 411–468. doi:10.2307/2946572. JSTOR 2946572.
- Gerver, Joseph L. (2003). "Noncollision Singularities: Do Four Bodies Suffice?". Exp. Math. 12 (2): 187–198. doi:10.1080/10586458.2003.10504491. S2CID 23816314.
- Saari, Donald G. (1977). "A global existence theorem for the four-body problem of Newtonian mechanics". J. Differential Equations. 26 (1): 80–111. Bibcode:1977JDE....26...80S. doi:10.1016/0022-0396(77)90100-0.
- Alligood 1996
- Blanchet 2001
- Krumscheid 2010
- Board 1999
- Ram 2010
- Cottet, Georges-Henri; Koumoutsakos, Petros D. (2000). Vortex Methods: Theory and Practice. Cambridge, UK: Cambridge Univ. Press. ISBN 0-521-62186-0.
- Ayala, Orlando; Grabowski, Wojciech W.; Wang, Lian-Ping (2007-07-01). "A hybrid approach for simulating turbulent collisions of hydrodynamically-interacting particles". Journal of Computational Physics. 225 (1): 51–73. Bibcode:2007JCoPh.225...51A. doi:10.1016/j.jcp.2006.11.016. ISSN 0021-9991.
- Torres, C. E.; Parishani, H.; Ayala, O.; Rossi, L. F.; Wang, L.-P. (2013-07-15). "Analysis and parallel implementation of a forced N-body problem". Journal of Computational Physics. 245: 235–258. Bibcode:2013JCoPh.245..235T. doi:10.1016/j.jcp.2013.03.008. ISSN 0021-9991.
References
- Aarseth, Sverre J. (2003). Gravitational n-body Simulations, Tools and Algorithms. Cambridge: Cambridge University Press. ISBN 978-0-521-43272-6.
- Alligood, K. T.; Sauer, T. D.; Yorke, J. A. (1996). Chaos: An Introduction to Dynamical Systems. New York: Springer. pp. 46–48. ISBN 978-0-387-94677-1.
- Bate, Roger R.; Mueller, Donald D.; White, Jerry (1971). Fundamentals of Astrodynamics. New York: Dover Publications. ISBN 978-0-486-60061-1.
- Blanchet, Luc (2001). "On the two-body problem in general relativity". Comptes Rendus de l'Académie des Sciences, Série IV. 2 (9): 1343–1352. arXiv:gr-qc/0108086. Bibcode:2001CRASP...2.1343B. doi:10.1016/s1296-2147(01)01267-7. S2CID 119101016.
- Board, John A. Jr.; Humphres, Christopher W.; Lambert, Christophe G.; Rankin, William T.; Toukmaji, Abdulnour Y. (1999). "Ewald and Multipole Methods for Periodic n-Body Problems". In Deuflhard, Peter; Hermans, Jan; Leimkuhler, Benedict; Mark, Alan E.; Reich, Sebastian; Skeel, Robert D. (eds.). Computational Molecular Dynamics: Challenges, Methods, Ideas. Lecture Notes in Computational Science and Engineering. Vol. 4. Berlin & Heidelberg: Springer. pp. 459–471. CiteSeerX 10.1.1.15.9501. doi:10.1007/978-3-642-58360-5_27. ISBN 978-3-540-63242-9.
- Bronowski, Jacob; Mazlish, Bruce (1986) [1960]. The Western Intellectual Tradition, from Leonardo to Hegel. New York: Dorset Press. ISBN 978-0-88029-069-2.
- Celletti, Alessandra (2008). "Computational celestial mechanics". Scholarpedia. 3 (9): 4079. Bibcode:2008SchpJ...3.4079C. doi:10.4249/scholarpedia.4079.
- Chenciner, Alain (2007). "Three body problem". Scholarpedia. 2 (10): 2111. Bibcode:2007SchpJ...2.2111C. doi:10.4249/scholarpedia.2111.
- Chierchia, Luigi; Mather, John N. (2010). "Kolmogorov–Arnold–Moser Theory". Scholarpedia. 5 (9): 2123. Bibcode:2010SchpJ...5.2123C. doi:10.4249/scholarpedia.2123.
- Cohen, I. Bernard (March 1980). "Newton's Discovery of Gravity". Scientific American. 244 (3): 167–179. Bibcode:1981SciAm.244c.166C. doi:10.1038/scientificamerican0381-166.
- Cohen, I. Bernard (1985). The Birth of a New Physics, Revised and Updated. New York: W. W. Norton & Co. ISBN 978-0-393-30045-1.
- Diacu, F. (1996). "The solution of the n-body problem" (PDF). The Mathematical Intelligencer. 18 (3): 66–70. doi:10.1007/bf03024313. S2CID 119728316.
- Féjoz, J. (2004). "Démonstration du 'théorème d'Arnold' sur la stabilité du système planétaire (d'après Herman)". Ergodic Theory Dynam. Systems. 24 (5): 1521–1582. doi:10.1017/S0143385704000410. S2CID 123461135.
- Heggie, Douglas; Hut, Piet (2003). The Gravitational Million-Body Problem, A Multidisciplinary Approach to Star Cluster Dynamics. Cambridge: Cambridge University Press. ISBN 978-0-521-77303-4.
- Heggie, Douglas C. (1991). "Chaos in the n-body Problem of Stellar Dynamics". In Roy, A. E. (ed.). Predictability, Stability and Chaos in n-Body Dynamical Systems. New York: Plenum Press. ISBN 978-0-306-44034-2.
- Hufbauer, Karl (1991). Exploring the Sun: Solar Science since Galileo. Baltimore: Johns Hopkins University Press, sponsored by the NASA History Office. ISBN 978-0-8018-4098-2.
- Krumscheid, Sebastian (2010). Benchmark of fast Coulomb Solvers for open and periodic boundary conditions (Report). Technical Report FZJ-JSC-IB-2010-01. Jülich Supercomputing Centre. CiteSeerX 10.1.1.163.3549.
- Kurth, Rudolf (1959). Introduction to the Mechanics of the Solar System. London: Pergamon Press. ISBN 978-0-08-009141-9.
- Leimanis, E.; Minorsky, N. (1958). "Part I: "Some Recent Advances in the Dynamics of Rigid Bodies and Celestial Mechanics" (Leimanis); Part II: "The Theory of Oscillations" (Minorsky)". Dynamics and Nonlinear Mechanics. New York: John Wiley & Sons. ASIN B0006AVKQW. OCLC 1219303.
- Lindsay, Robert Bruce (1961). Physical Mechanics (3rd ed.). Princeton: D. Van Nostrand Co. ASIN B0000CLA7B. OCLC 802752879.
- Meirovitch, Leonard (1970). Methods of Analytical Dynamics. New York: McGraw-Hill Book Co. ISBN 978-0-07-041455-6.
- Meyer, Kenneth Ray; Hall, Glen R. (2009). Introduction to Hamiltonian Dynamical Systems and the n-body Problem. New York: Springer Science & Business Media. ISBN 978-0-387-09724-4.
- Mittag-Leffler, G. (1885–1886). "The n-body problem (Prize Announcement)". Acta Mathematica. 7: I–VI. doi:10.1007/BF02402191.
- Moulton, Forest Ray (1970). An Introduction to Celestial Mechanics. New York: Dover Publications. ISBN 978-0-486-62563-8.
- Newton, Isaac (1687). Philosophiae Naturalis Principia Mathematica (in Latin). Londini [London]: Jussu Societatis Regiæ ac Typis Josephi Streater. Prostat apud plures Bibliopolas. OCLC 915353069. Also English translation of 3rd (1726) edition by I. Bernard Cohen and Anne Whitman (Berkeley, CA, 1999). ISBN 978-0-520-08817-7.
- Ram, Parikshit; Lee, Dongryeol; March, William B.; Gray, Alexander G. (2009). "Linear-time Algorithms for Pairwise Statistical Problems" (PDF). NIPS: 1527–1535. Archived from the original (PDF) on 2017-04-21. Retrieved 2014-03-28.
- Rosenberg, Reinhardt M. (1977). "Chapter 19: About Celestial Problems". Analytical Dynamics, of Discrete Systems. New York: Plenum Press. pp. 364–371. ISBN 978-0-306-31014-0.
- Gallant, Roy A. (1968). The Nature of the Universe. Garden City, NY: Doubleday. In partnership with Science Service. OCLC 689289.
- Sundman, K. F. (1912). "Mémoire sur le problème de trois corps". Acta Mathematica. 36: 105–179. doi:10.1007/bf02422379.
- Tisserand, François Félix (1894). "Traité de Mécanique Céleste" (PDF). Lilliad - Université de Lille - Sciences et Technologies. Paris: Gauthier-Villars Et Fils. III: 27. hdl:1908/4228. OCLC 951409281.
- Trenti, Michele; Hut, Piet (2008). "n-body simulations". Scholarpedia. 3 (5): 3930. Bibcode:2008SchpJ...3.3930T. doi:10.4249/scholarpedia.3930.
- Truesdell, Clifford (1968). Essays in the History of Mechanics. Berlin; Heidelberg: Springer-Verlag. ISBN 978-3-642-86649-4.
- Van Winter, Clasine (1970). "The n-body problem on a Hilbert space of analytic functions". In Gilbert, Robert P.; Newton, Roger G. (eds.). Analytic Methods in Mathematical Physics. New York: Gordon and Breach. pp. 569–578. OCLC 848738761.
- Wang, Qiudong (1991). "The global solution of the n-body problem". Celestial Mechanics and Dynamical Astronomy. 50 (1): 73–88. Bibcode:1991CeMDA..50...73W. doi:10.1007/BF00048987. ISSN 0923-2958. MR 1117788. S2CID 118132097.
- Xia, Zhihong (1992). "The Existence of Noncollision Singularities in Newtonian Systems". Annals of Mathematics. 135 (3): 411–468. doi:10.2307/2946572. JSTOR 2946572.
Further reading
- Battin, Richard H. (1987). An Introduction to The Mathematics and Methods of Astrodynamics. AIAA. Employs energy methods rather than a Newtonian approach.
- Boccaletti, D.; Pucacco, G. (1998). Theory of Orbits. Springer-Verlag.
- Brouwer, Dirk; Clemence, Gerald M. (1961). Methods of Celestial Mechanics. Academic Press.
- Crandall, Richard E. (1996). "Chapter 5: "Nonlinear & Complex Systems"; paragraph 5.1: "n-body problems & chaos"". Topics in Advanced Scientific Computation. Springer-Verlag. pp. 215–221.
- Crandall, Richard E. (1996). "Chapter 2: "Exploratory Computation"; Project 2.4.1: "Classical Physics"". Projects in Scientific Computation. pp. 93–97. Bibcode:1994ComPh...8..531C. doi:10.1063/1.4823331.
{{cite book}}:|journal=ignored (help) - Eisele, John A.; Mason, Robert M. (1970). "Applied Matrix and Tensor Analysis". Physics Today. 25 (12): 55. Bibcode:1972PhT....25l..55E. doi:10.1063/1.3071146.
- Gelman, Harry (1968). "The second orthogonality conditions in the theory of proper and improper rotations: Derivation of the conditions and of their main consequences". J. Res. NBS 72B (Math. Sci.). 1968 (3).
Gelman, Harry (1968). "The intrinsic vector". J. Res. NBS 72B (Math. Sci.). 1968 (3).
Gelman, Harry (1969). "The Conjugacy Theorem". J. Res. NBS 72B (Math. Sci.). 1969 (2).
Gelman, Harry (October 1971). "A Note on the time dependence of the effective axis and angle of a rotation". J. Res. NBS 72B (Math. Sci.). 1971 (3–4). - Hagihara, Y. (1970). Celestial Mechanics. Vol. I, II pt 1, II pt 2. MIT Press.
- Korenev, G. V. (1967). The Mechanics of Guided Bodies. CRC Press.
- Meriam, J. L. (1978). Engineering Mechanics. Vol. 1–2. John Wiley & Sons.
- Murray, Carl D.; Dermott, Stanley F. (2000). Solar System Dynamics. Cambridge University Press.
- Quadling, Henley (June 1994). Gravitational n-Body Simulation: 16 bit DOS version. nbody*.zip is available at https://web.archive.org/web/19990221123102/http://ftp.cica.indiana.edu/: see external links.
- Saari, D. (1990). "A visit to the Newtonian n-body problem via Elementary Complex Variables". American Mathematical Monthly. 89 (2): 105–119. doi:10.2307/2323910. JSTOR 2323910.
- Saari, D. G.; Hulkower, N. D. (1981). "On the Manifolds of Total Collapse Orbits and of Completely Parabolic Orbits for the n-Body Problem". Journal of Differential Equations. 41 (1): 27–43. Bibcode:1981JDE....41...27S. doi:10.1016/0022-0396(81)90051-6.
- Szebehely, Victor (1967). Theory of Orbits. Academic Press.
External links
- Three-Body Problem at Scholarpedia
- More detailed information on the three-body problem
- Regular Keplerian motions in classical many-body systems
- Applet demonstrating chaos in restricted three-body problem Archived 2009-10-17 at the Wayback Machine
- Applets demonstrating many different three-body motions
- On the integration of the n-body equations Archived 2016-10-30 at the Wayback Machine
- Java applet simulating Solar System
- Java applet simulating a stable solution to the equi-mass 3-body problem
- A java applet to simulate the 3D movement of set of particles under gravitational interaction
- Javascript Simulation of our Solar System
- The Lagrange Points Archived 2005-11-09 at Bibliotheca Alexandrina – with links to the original papers of Euler and Lagrange, and to translations, with discussion
- Parallel GPU N-body simulation program with fast stackless particles tree traversal
Gravitational orbits | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Types |
| ||||||||
| Parameters |
| ||||||||
| Maneuvers | |||||||||
| Orbital mechanics |
| ||||||||