Real-time kinematic positioning
Real-time kinematic positioning (RTK) is the application of surveying to correct for common errors in current satellite navigation (GNSS) systems. It uses measurements of the phase of the signal's carrier wave in addition to the information content of the signal and relies on a single reference station or interpolated virtual station to provide real-time corrections, providing up to centimetre-level accuracy (see DGPS).[1] With reference to GPS in particular, the system is commonly referred to as carrier-phase enhancement, or CPGPS.[2] It has applications in land surveying, hydrographic surveying, and in unmanned aerial vehicle navigation.

Background
The distance between a satellite navigation receiver and a satellite can be calculated from the time it takes for a signal to travel from the satellite to the receiver. To calculate the delay, the receiver must align a pseudorandom binary sequence contained in the signal to an internally generated pseudorandom binary sequence. Since the satellite signal takes time to reach the receiver, the satellite's sequence is delayed in relation to the receiver's sequence. By increasingly delaying the receiver's sequence, the two sequences are eventually aligned.
The accuracy of the resulting range measurement is essentially a function of the ability of the receiver's electronics to accurately process signals from the satellite, and additional error sources such as non-mitigated ionospheric and tropospheric delays, multipath, satellite clock and ephemeris errors.[3]
Carrier-phase tracking
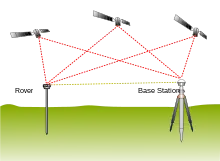
RTK follows the same general concept, but uses the satellite signal's carrier wave as its signal, ignoring the information contained within. RTK uses a fixed base station and a rover to reduce the rover's position error. The base station transmits correction data to the rover.
As described in the previous section, the range to a satellite is essentially calculated by multiplying the carrier wavelength times the number of whole cycles between the satellite and the rover and adding the phase difference. Determining the number of cycles is non-trivial, since signals may be shifted in phase by one or more cycles. This results in an error equal to the error in the estimated number of cycles times the wavelength, which is 19 cm for the L1 signal. Solving this so-called integer ambiguity search problem results in centimeter precision. The error can be reduced with sophisticated statistical methods that compare the measurements from the C/A signals and by comparing the resulting ranges between multiple satellites.
The improvement possible using this technique is potentially very high if one continues to assume a 1% accuracy in locking. For instance, in the case of GPS, the coarse-acquisition (C/A) code, which is broadcast in the L1 signal, changes phase at 1.023 MHz, but the L1 carrier itself is 1575.42 MHz, which changes phase over a thousand times more often. A ±1% error in L1 carrier-phase measurement thus corresponds to a ±1.9 mm error in baseline estimation.[4]
Practical considerations
.jpg.webp)
In practice, RTK systems use a single base-station receiver and a number of mobile units. The base station re-broadcasts the phase of the carrier that it observes, and the mobile units compare their own phase measurements with the one received from the base station. There are several ways to transmit a correction signal from base station to mobile station. The most popular way to achieve real-time, low-cost signal transmission is to use a radio modem, typically in the UHF Band. In most countries, certain frequencies are allocated specifically for RTK purposes. Most land-survey equipment has a built-in UHF-band radio modem as a standard option. RTK provides accuracy enhancements up to about 20 km from the base station.[5]
This allows the units to calculate their relative position to within millimeters, although their absolute position is accurate only to the same accuracy as the computed position of the base station. The typical nominal accuracy for these systems is 1 centimetre ± 2 parts-per-million (ppm) horizontally and 2 centimetres ± 2 ppm vertically.
Although these parameters limit the usefulness of the RTK technique for general navigation, the technique is perfectly suited to roles like surveying. In this case, the base station is located at a known surveyed location, often a benchmark, and the mobile units can then produce a highly accurate map by taking fixes relative to that point. RTK has also found uses in autodrive/autopilot systems, precision farming, machine control systems and similar roles.
The RTK networks extend the use of RTK to a larger area containing a network of reference stations.[7] Operational reliability and accuracy depend on the density and capabilities of the reference-station network.
A Continuously Operating Reference Station (CORS) network is a network of RTK base stations that broadcast corrections, usually over an Internet connection. Accuracy is increased in a CORS network, because more than one station helps ensure correct positioning and guards against a false initialization of a single base station.[8]
A Virtual Reference Network (VRN) can similarly enhance precision without using a base station.[9]
See also
References
- Wanninger, Lambert. "Introduction to Network RTK". www.wasoft.de. IAG Working Group 4.5.1. Retrieved 14 February 2018.
- Mannings, Robin (2008). Ubiquitous Positioning. Artech House. p. 102. ISBN 978-1596931046.
- Weiffenbach, G. C. (1967-12-31), "Tropospheric and Ionospheric Propagation Effects on Satellite Radio-Doppler Geodesy", Electromagnetic Distance Measurement, University of Toronto Press, pp. 339–352, doi:10.3138/9781442631823-030, ISBN 9781442631823
- "Geo-Positioning, GPS, DGPS, and Positioning Accuracy" (PDF). Archived from the original (PDF) on November 22, 2009. Retrieved 2006-06-20.
- RIETDORF, Anette; DAUB, Christopher; LOEF, Peter (2006). "Precise Positioning in Real-Time using Navigation Satellites and Telecommunication". PROCEEDINGS OF THE 3rd WORKSHOP ON POSITIONING, NAVIGATION AND COMMUNICATION. CiteSeerX 10.1.1.581.2400.
- Gakstatter, Eric. "RTK Networks – What, Why, Where?" (PDF). www.gps.gov. USSLS/CGSIC Meeting 2009. Retrieved 14 February 2018.
- US Department of Commerce, NOAA; US Department of Commerce, NOAA. "National Geodetic Survey - CORS Homepage". www.ngs.noaa.gov. Retrieved 2018-12-11.
- "CDOT Survey Manual" (PDF). Colorado Department of Transportation. 2021.
External links
- RTK Detailed Concepts GNSS, RTK and Satellite Positioning concepts in depth.
- CORS Map Global Network of Continuously Operating Reference Stations.
- GBAS Map Global Map Coverage of Ground Based Augmentation Reference Beacons (GBAS).
- Guidelines User Guidelines for Single Base Real Time GNSS Positioning (NOAA)
- RTK Integration Manual to integrate RTK Receivers into UAVs and Robotics
- History of RTK An article by people involved in the early days of RTK