Second Order Systems: Examples
Example 1
A damped control system for aiming a hydrophonic array on a minesweeper vessel has the following open-loop transfer function from the driveshaft to the array.

The gain parameter K can be varied. The moment of inertia, J, of the array and the force due to viscous drag of the water, Kd are known constants and given as:


Tasks
- The system is arranged as a closed loop system with unity feedback. Find the value of K such that, when the input is a unit step, the closed loop response has at most a 50% overshoot (approximately). You may use standard response curves. Should K be greater or less than this value for less overshoot?
- Find the corresponding time-domain response of the system.
- The system is now given an input of constant angular velocity, V. For the limiting value of K found above, calculate the maximum value of V such that the array follows the input with at most 5° error.
Task 1
First, let us draw the block diagram of the system. We know the open-loop transfer function, and that there is unit feedback. Therefore, we have:
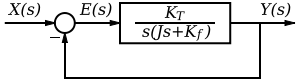
The closed-loop gain is given by:




We now need to express the closed-loop transfer function in the standard second order form.


We can now express the natural frequency ωn and damping ratio, ζ:



We now look at the standard response curves for second order systems.
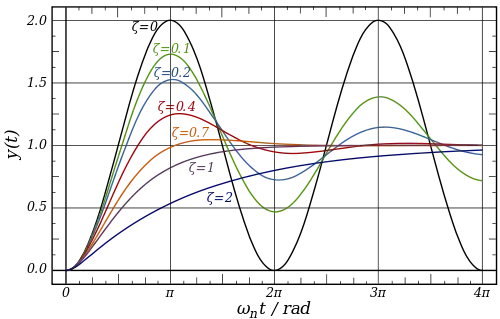
We see that for 50% overshoot, we need ζ=0.2 or more.


This is the maximum permissible value, thus K should be less than this value for less overshoot. We can now evaluate the natural frequency fully:

Task 2
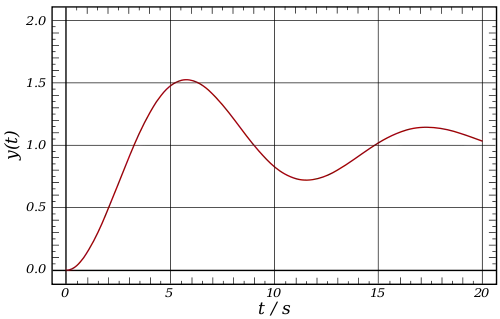
The output of the second order system is given by the following equation:




We can plot the output of this system:
Task 3
The tracking error signal, E(s), is equal to the output's deviation from the input.

Now, we can find the gain from the reference input, R(s) to the error tracking signal:

The gain from the input to the error tracking signal of a unity feedback system like this is simply .




Now, R(s) is given by the Laplace transform of a ramp of slope V:

We now use the final value theorem to find the value of E(s) in the steady state:




We require this to be less than

